Description
This product includes code, documentation, and 3D models for the following products:
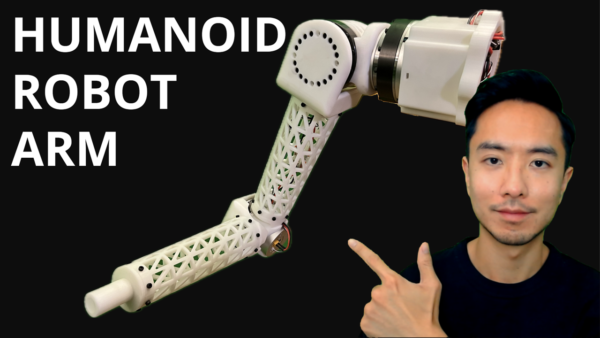
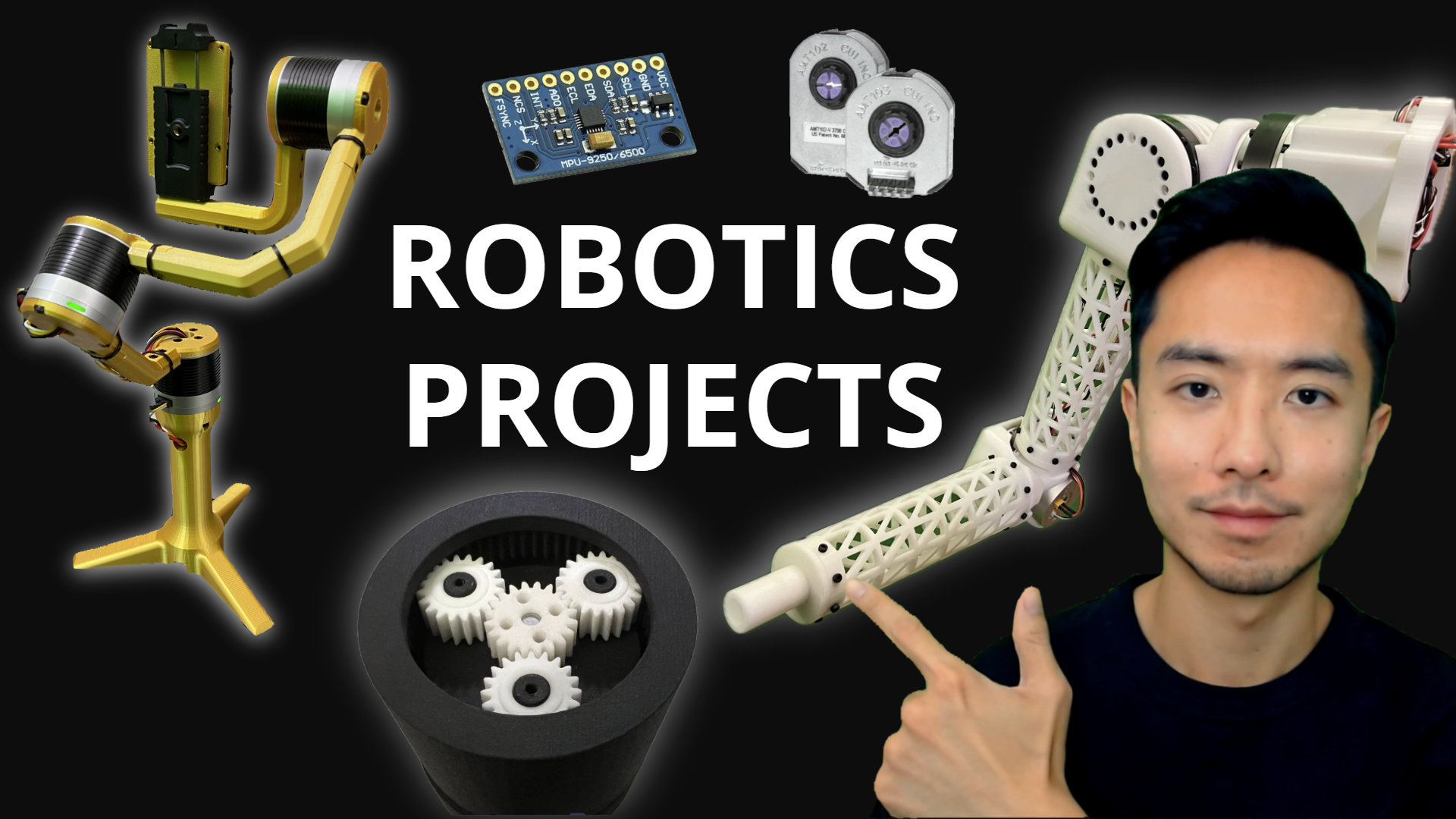
- 3D Printed Humanoid Robot Arm with Position Contorl
- 3D Printed Camera Gimbal with Stabilization Control using IMU
- 3D Printed Planetary Gearbox with Position and Velocity Control
- Custom Brushless Robotic Actuator using Frameless Motors
- IMU Pose Tracking with Kalman Filtering with ROS2 and Raspberry Pi
- Read Encoders from Arduino & ROS on Jetson Nano (CUI AMT102-V Capacititive Encoder)
- PID Control and Tuning for BLDC Actuator using ROS2
- ROS2_Control for ANY Brushless (BLDC) Motor on REAL Hardware (Robotic Actuator Control)